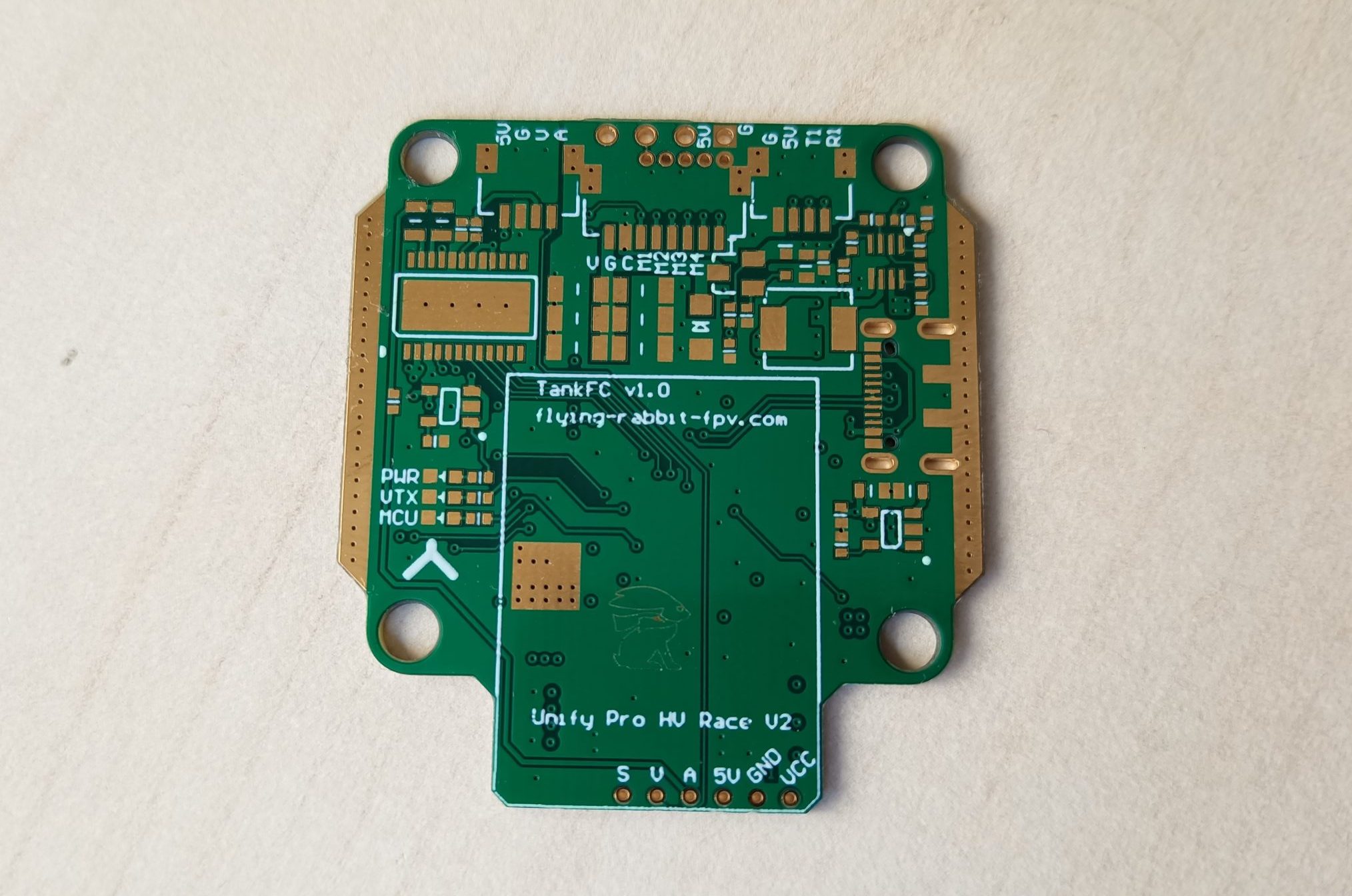
Remember the solder bridge to select the power source for the video part of the board ? It’s purpose was to power the OSD chip and the camera from either the Vtx 5V or the board 5V. But when configured for Vtx 5V, the OSD wasn’t working.
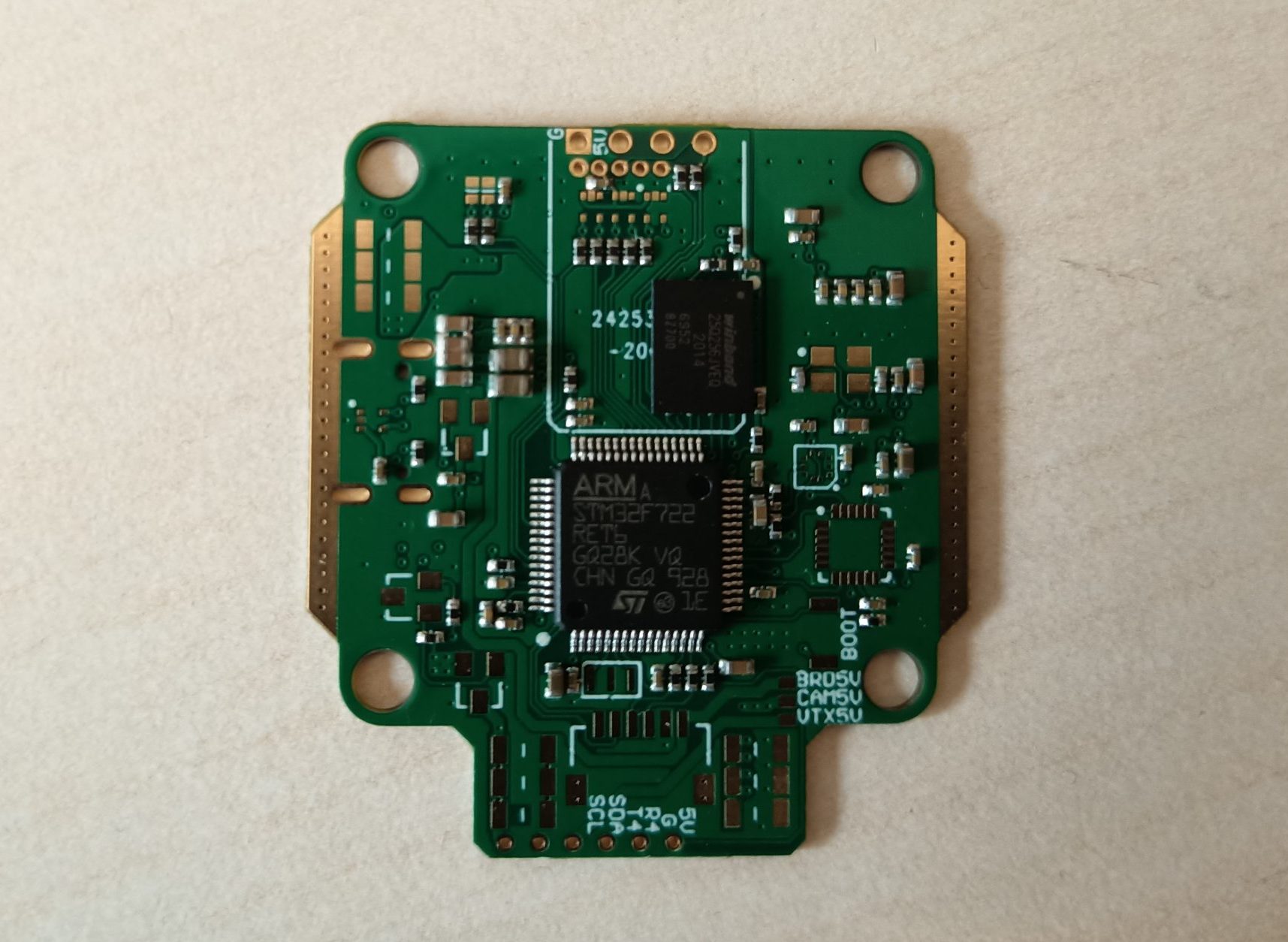
I’m pretty sure it’s a power sequencing issue. After some analysis, I’ve found out that the Vtx takes few second to output 5V. By this time, the STM32 MCU has booted, and didn’t detect any OSD chip (because it is not powered yet). Therefore, it disables the OSD function. So when 5V is finally applied to the video circuit, the OSD chip don’t receive any commands from the MCU.

{kind=link}
{kind=link}
{kind=link}


{kind=link}
{kind=link}


{kind=link}
{kind=link}


{kind=link}
{kind=link}
{kind=link}